
【Math for ML】矩阵分解(Matrix Decompositions) (上)
I. 奇异值分解(Singular Value Decomposition)
1. 定义
Singular Value Decomposition (SVD)是线性代数中十分重要的矩阵分解方法,被称为“线性代数的基本理论”,因为它不仅可以运用于所有矩阵(不像特征值分解只能用于方阵),而且奇异值总是存在的。
SVD定理
设一个矩阵Am×nAm×n的秩为r∈[0,min(m,n)]r∈[0,min(m,n)],矩阵AA的奇异值分解形式如下:
A=UΣVT(1.1.1)(1.1.1)A=UΣVT

其中U∈Rm×mU∈Rm×m是一个正交矩阵(即列向量ui,i=1,...,mui,i=1,...,m互相正交),V∈Rn×nV∈Rn×n也是一个正交矩阵(即列向量vi,i=1,...,nvi,i=1,...,n互相正交),ΣΣ是一个m×nm×n的矩阵,且满足Σii=σi≥0Σij=0,i≠jΣii=σi≥0Σij=0,i≠j
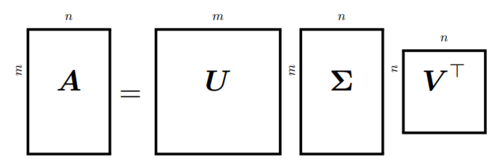
上面的σiσi称为奇异值(singular values),uiui称为左奇异值(left-singular values),vivi称为右奇异值(right-singular values)。另外通常默认有σ1≥...≥σr≥0σ1≥...≥σr≥0。
注意:矩阵AA是一个长方形矩阵,不一定是方阵,另外ΣΣ和矩阵AA的维度相同,并且其包含一个对角子矩阵(diagonal submatrix)。
2. 图解SVD
对于奇异值分解可以从两个角度进行理解:一是将SVD视为对基向量组(bases),即坐标系的一顺序变换,二是将SVD视为对于数据点的变换。
一般来说要让矩阵AA作用于另一个矩阵,都是左乘AA,所以由公式(1)可知道首先是VTVT,然后是ΣΣ,最后是矩阵UU变换。所以矩阵AA的变换实际上是经过了三个步骤,如下图所示(为方便理解使用了二维和三维图像进行说明):
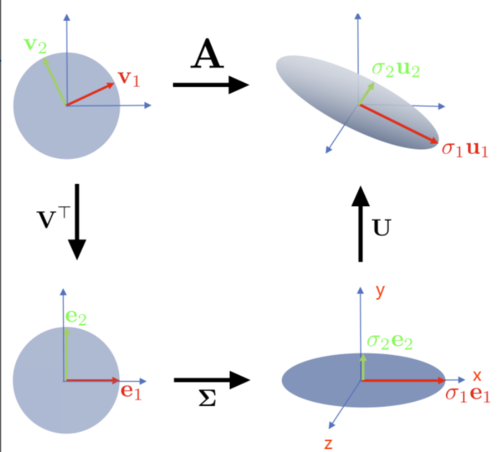
假设左上角的单位圆是在RnRn空间,其标准基用B=[v1,v2]B=[v1,v2]表示。左下角的圆也在RnRn空间里,其标准基用B~=[e1,e2]B~=[e1,e2]表示,右下角的圆在RmRm空间里,其标准基用C~C~表示。右上角的圆在RmRm空间里。
由左上角到左下角:可以很清楚的看到VT∈Rn×nVT∈Rn×n的作用是对最开始的坐标轴(或标准基)(BB)还原成canonical basis(B~B~)。所以VTVT的作用是将坐标轴由BB转变成B~B~。
由左下角到右下角:经过ΣΣ矩阵变换后从RnRn空间转换到了RmRm空间。上图是从二维空间变成了三维空间,即增加了z轴。当然维度也可以减少。此外单位圆还是处在[e1,e2][e1,e2]空间内(即x,yx,y轴组成的空间内),而且还会根据奇异值的大小做相应比例的伸缩。
右下角到右上角: 矩阵UU继续对[e1,e2][e1,e2]基做变换,增加的那个维度(z轴)方向不做变化。
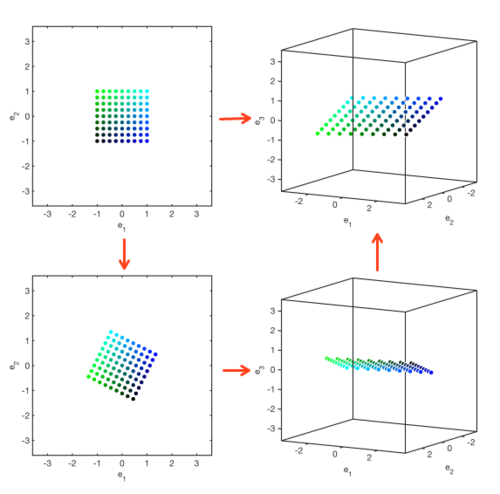
下图更加形象地展示了奇异值分解的作用,变换过程和上面一样,故不再赘述:
3. SVD计算
本小节内容不证明SVD的存在性。
在介绍SVD如何计算之前,首先回顾一下【Math for ML】矩阵分解(Matrix Decompositions) (下)中介绍过任何对称矩阵都能对角化,其公式如下:
S=ST=PDPTS=ST=PDPT
所以一个对称矩阵的奇异值分解是十分相似的,即
S=UΣVTS=UΣVT
对比之后可知有U=P,V=P,Σ=DU=P,V=P,Σ=D
另外我们还需要知道的是对于任意矩阵A∈Rm×nA∈Rm×n,其转置矩阵和其本身相乘之后得到的矩阵都是对称矩阵,即ATA∈Rn×nATA∈Rn×n和AAT∈Rm×mAAT∈Rm×m均为对称矩阵。(证明略)
接下来结合SVD公式给出对任意矩阵A∈Rm×nA∈Rm×nSVD计算的推导过程:
计算VV
已知ATAATA可作如下对角化运算,且其特征值λi≥0λi≥0
ATA=PDPT=Pλ1⋮0⋯⋱⋯0⋮λnPT(1.3.1)(1.3.1)ATA=PDPT=P[λ1⋯0⋮⋱⋮0⋯λn]PT
因为任何矩阵都可做奇异值分解,故有
ATA=(UΣVT)T(UΣVT)=VΣTUTUΣVT(1.3.2)(1.3.2)ATA=(UΣVT)T(UΣVT)=VΣTUTUΣVT
因为UU为正交矩阵,所以UTU=IUTU=I,所以(1.3.2)式进一步简化可得
ATA=VΣTΣVT=Vσ21⋮0⋯⋱⋯0⋮σ2nVT(1.3.3)(1.3.3)ATA=VΣTΣVT=V[σ12⋯0⋮⋱⋮0⋯σn2]VT
由(1.3.1)和(1.3.3)可得
V=Pσ2i=λi(1.3.4)(1.3.4)V=Pσi2=λi
所以任意矩阵AA的右奇异矩阵VV是ATAATA的特征矩阵PP。
计算UU
和求VV类似,这里不再赘述。UU即为AATAAT的特征矩阵。
计算ΣΣ
注意上面两步中已经求出了σ2iσi2,接下来要做的就是把上面所求出的σ2iσi2从大到小排序并开根号,且ΣΣ要与AA的维度保持一致
具体的SVD计算示例可参见奇异值分解(SVD)计算过程示例。
4. 特征值分解(EVD) vs. 奇异值分解(SVD)
下面对特征值分解A=PDP−1A=PDP−1和奇异值分解A=UΣVTA=UΣVT作如下总结和对比:
SVD对于任意矩阵都存在;而EVD只能在n阶方阵的基础上才能被定义,而且只有当方阵满秩,即有n个独立的特征向量条件下才可以做特征值分解;
特征值分解后得到的矩阵PP不必须是正交矩阵,也就是说PP可以起到伸缩和旋转的作用;而SVD中的U,VU,V矩阵都必须是正交矩阵,所以这两个矩阵只能起到旋转变换的作用,起伸缩变换作用的是矩阵ΣΣ。
特征值分解和奇异值分解都由以下三个线性映射步骤组成:
1.Change of basis in the domain
2.Independent scaling of each new basis vector and mapping from domain to co-domain
3.Change of basis in the co-domain
共同学习,写下你的评论
评论加载中...
作者其他优质文章



